A robot arm is a programmable human-like arm designed to execute rigorous, energy-intensive and highly repetitive tasks quickly and efficiently. It is used in industries to carry out jobs which will otherwise not be done by humans. This includes activities that require high levels of precision. A robot arm can fit a cap on beverage bottles with an equal amount of force, even if it is made to do so a thousand times; humans won’t be able to do this. This modus operandi of a robotic arm is a reflection of the root word of ‘robot’; robota—a Czech word which means forced labor.
Arm
The arm is also described as a manipulator. This is the part of the robot that functions to execute tasks. The arm helps to align the end effector in the right position. It consists of four main components, namely:
Gearbox
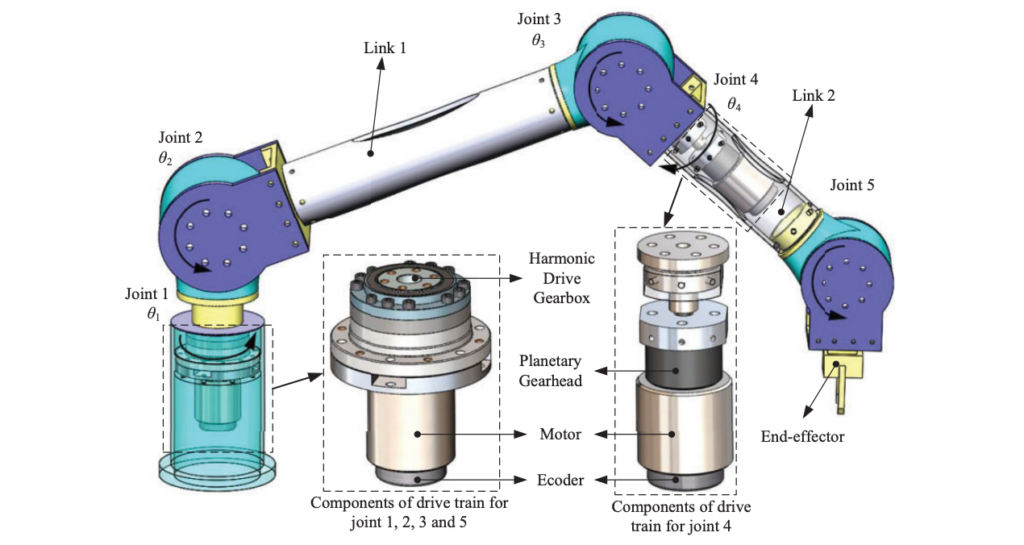
This component is responsible for controlling the speed and direction of movement. It is also the key to guarantee the lifetime and accuracy. It acts as an interface between the motor, which generates mechanical energy for a planned movement, and the end effector, which carries out the eventual movement. It is the guarantee of the robot’s lifecycle.
A common gearbox type is the harmonic drive, also called strain wave gearing or zero backlash gearbox. They are light-weight, space saving and durable, which are born to produce very high-precision outcomes.
Servo Motor
This is the main power source of robots. The servo motor is specialized for high-response, high-precision positioning. As a motor capable of accurate rotation angle and speed control, it can be used for a variety of equipment.
A servo motor has a rotor which is set into rotary motion by a servo drive. It also has an inbuilt sensor which provides information about velocity and position of the rotor to the servo drive. The servo drive uses this information to regulate the movement of the rotor. The Servo motor is well adapted for use in high-precision applications as well as high-speed operations.
Motor drivers
Their function, as their name implies, is to upgrade low-current signals to high-current signals powerful enough to drive the servo motor. The electric circuit present in the servo motor operates on low currents, which is not sufficient enough to drive it. Hence the need for motor drivers.
In addition, they ensure precise robot control. For instance, an absolute encoder, which is the key to get the position feedback of the motor driver, informs the servomotor of the position when the robot arm is turned on. This prevents errors in instances when there’s an unexpected power outage; the servomotor has to be aware of the position before it can recommence work.
Links
Links serve as rigid structures that constitute the mechanism of the robot. They equip the robotic arm with the stiffness required for quick and accurate operations. Carbon fiber is an ideal material for robots. Compared with aluminum, carbon fiber has great thermal stability. In addition, it doesn’t affect the accuracy of the robot. Its light weight saves power, ensures a longer work time and makes the workflow safer. However, considering the production cost, most robots are built with aluminum.
Controller
The controller functions to oversee the different parts of a robotic arm. It consists of two major components. They include:
Robot brain
This is the part of the controller that receives instructions, interprets and executes them. It processes the command and plans the trajectory by dedicated algorithm. There are 2 basic parts of the algorithm:
Inverse kinematics: here, the robot utilizes kinematic equations to calculate the motion required to reach a specific position.
Forward kinematics: here, the robot uses angular velocities and joint angles to determine both the velocity and position of end effectors.
Usually, it needs a x86 high-performance processor which is powerful enough to process the position of each actuator inside the robot arm thousands of times in each second.
User Interface
This is an important aspect of a robotic controller. It ensures easy handling of the robot. This is the component that allows users to send commands to the robot. The common form of this feature is a teach pendant. A teach pendant is hand-operated and tablet-like. It is used by programmers to teach the robot arm how to perform a task. The teach pendant is removed when the robot arm is ready to be deployed, but here is a more convenient way, you can use a tabletop or an iPad to control the UFactory robot anytime.
Robotic controllers ensure a smooth workflow. They are used to control both simple work processes and complex manufacturing procedures. The controller determines the ease with which a robotic arm executes a task. The effectiveness of a robot arm is largely dependent on the controller.
Sensor
This component provides information about the robotic arm and its surrounding. Robotic arm sensors act just like our human senses. Sensors enable a robot arm to see, hear, taste, touch and smell. An industrial robot can detect a noxious smell helping to safeguard against chemical leakage. Robotic sensors include:
Internal sensors
They provide information about the robot’s position, acceleration, velocity and torque.
A collision detector sensor is a basic equipment of a robot arm. It helps the robot arm avoid collisions by helping to detect an object in its path.
External sensors
They capture information about the robot’s surroundings. This external data include the layout of the environment. An external sensor collects all this information and relays it back to the controller. This feedback is then used by the controller to fine-tune the movements of the end effector. External sensors include:
Force torque sensor
Helps the robot arm to know what’s going on in all axes.
Visual Sensors
The sense of vision is the most commonly utilized robotic sense. Visual sensors can provide a view of the environment. A visual sensor helps an industrial robot to know which item to pick out of a number of items. The functionality of an optical sensor is immense. A visual sensor can identify an object’s color, assess the thickness of a material, determine the smoothness of a surface and measure a liquid’s flow rate. An optical sensor can provide information about the position and velocity of a robot arm.
A visual sensor can be in form of a camera or a laser scanner.
Visual sensors powered by laser utilize Light Detection and Ranging (LiDAR) and can be applied in both 2D and 3D. The laser technology allows for quick and precise measurement of distance. The laser scanner measure distances by estimating the time lapse between the emitted electromagnetic pulse and reflection from the nearest object. A shorter time lapse means the object is nearby, while a longer time lapse indicates a farther object. Laser-powered optical sensors have their limitations. Their vision can be clouded by direct sunlight. Notwithstanding, laser sensors exhibit more resistance to direct sunlight compared to other sensors.
The robotic visual sense has been greatly improved. Autonomous robotic arms are no longer limited by obstacles. The visual acuity of cameras is much better. Optical sensors can now differentiate between a human and an object. High-speed software has been introduced for the swift processing of visual data obtained by optical sensors. For improved accuracy and reliability, robot arms obtain data using a combination of sensors.
End effector
This component can be likened to the hand in a human arm. It is the robotic part that’s in contact with the object to be manipulated. It can be in the form of a 2-finger gripper, BIO gripper, magnet, welder gun, drill and vacuum pump. This is an important part of a robot arm. It is the component that makes a robot arm ideal for a particular task. End effectors make it possible to customize a robot arm for a specific role easily. It just requires that you swap the end effector with another that is best suited for the new task. With the aid of end effectors, a robotic arm can be made to be multifunctional. The same robot that bores holes can also tighten bolts.
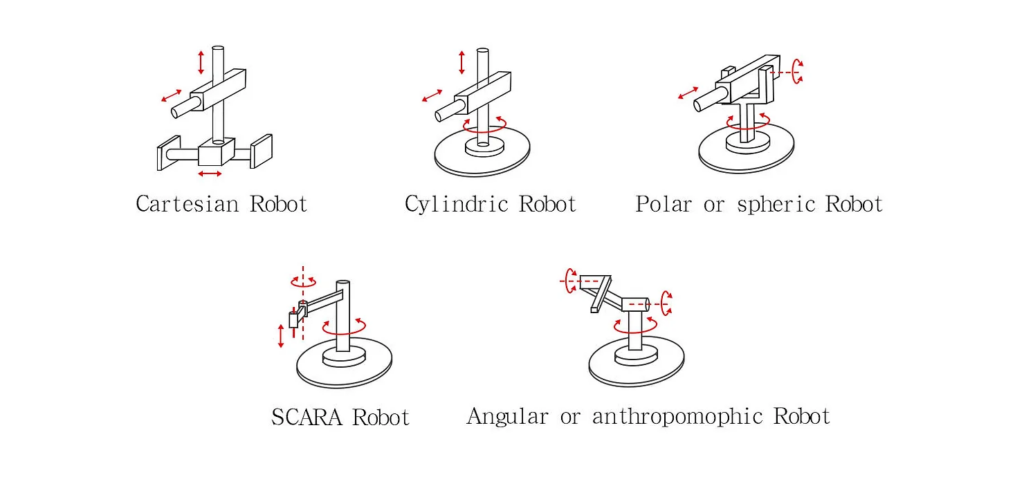
There are different types of robotic arms. Each with its peculiar structure and applications. The differences that exist between the different types border on their unique articulations, range of movements and functionality. The types of robotic arms include:
Cartesian Robotic Arms
The mechanism of operation of these robots is based on the Cartesian coordinate system (x, y, and z). They are also called rectilinear robots. Cartesian robot arms allow movements in three planes. They consist of three articulating joints which are programmed to coordinate movement along three axes. This makes them more accurate and simpler to operate. The actuators help to manipulate an object through sequential linear movements, effectively switching between positions. One actuator moves left to right on the x-axis, another actuator moves upward and downward on the y-axis, while the last actuator slides forward and backward along the z-axis. A Cartesian robotic arm can be placed horizontally, overhead or vertically.
A Cartesian robotic has three axes. Repeatability of 0.01mm to 0.34mm. A minimum payload of 100Kg and a maximum payload of 250Kg. Its average speed is 1200mm/s
Application of Cartesian robotic arm include:
•3D Printing
•Material Handling
•Drilling
•Packaging
Advantages of Cartesian robotic arms
•Ease of operation
•Less cost.
•High level of precision.
•Can be used to handle heavy materials.
•Easily customizable.
Disadvantages of Cartesian robotic arms
•Movement only occurs in three dimensions.
•A large workspace is required for its installation and its overall function.
Cylindrical Robotic Arm
A Cylindrical Robotic Arm has three axes. A Repeatability of 0.1mm to 0.5mm. A minimum payload of 5Kg and a maximum payload of 250 Kg. Its average speed is 1000mm/s.
Application of Cylindrical Robotic Arms Include:
•Car Assembly
•Machine tool handling
•Spot welding
Advantages of Cylindrical Robotic Arms
•Travels between two given points faster than Cartesian robotic arms.
•Can handle heavy payloads
Disadvantages of Cylindrical Robotic Arms
•Requires more workspace
•As horizontal stroke increases, accuracy becomes reduced.
•They require a more sophisticated control mechanism compared to Cartesian robotic arms.
SCARA
The word SCARA is an acronym for Selective Compliance Articulated Robotic Arm. These are robotic arms that contain two parallel rotatory joints. Though they are faster than Cartesian robots, Cartesian robotic arms have more precision. They move swiftly on all three axes and are best suited for lateral movements.
They are widely employed in small electronic manufacturing due to their relatively small size, cost-effectiveness and ease of operation. The word selective compliance implies that they tolerate movements in certain planes whilst being rigid in other directions. Hence, they’re stiff in the vertical plane and more mobile in the horizontal axis.
They are ideal for assembly operations. Their lightweight, combined with the rigidity of their design, makes it possible for them to attach parts to a single-plane device—for instance, a circuit board.
Application of SCARA Robots
•Material Handling
•Palletizing
•Assembly
•Inspection and Testing
Advantages of SCARA Robotic Arms
•Well-suited for assembly operations
•High Speed and High Accuracy
•Outstanding repeatability
Disadvantages of SCARA Robotic Arms
•Limited linear movements.
•More expensive than Cartesian robotic arms.
•A highly trained programmer is required to operate it.
•Can’t be easily programmed offline.
Spherical or Polar Robotic Arms
The basic plan of these robots consists of an arm connected to a linear joint and two rotatory joints. Movements are along polar coordinates bringing about a spherical motion sequence. In a polar configuration, a linear joint is placed above or below a rotatory joint, and a rotating base supports these joints.
These robots first appeared on the assembly line of General Motors in the 1950s, helping to place welding parts and die castings on auto bodies. They represent the oldest robotic arm technology. Newer robotic arms, such as Cartesian robots, have progressively replaced spherical robots in industries. They are cost-effective. A polar robot offers three degrees of freedom.
Application of Polar Robotic Arms
•Die casting.
•Machine tools handling.
•Arc welding.
Advantages of Polar Robotic Arms
•Extensive reach in the horizontal plane.
•Performs operations quickly.
Disadvantages of Polar Robotic Arms
•Increasing radial stroke reduces accuracy.
•Limited vertical reach.
•Less flexible than articulated robotic arms.
•Complex framework.
Angular Robotic Arms
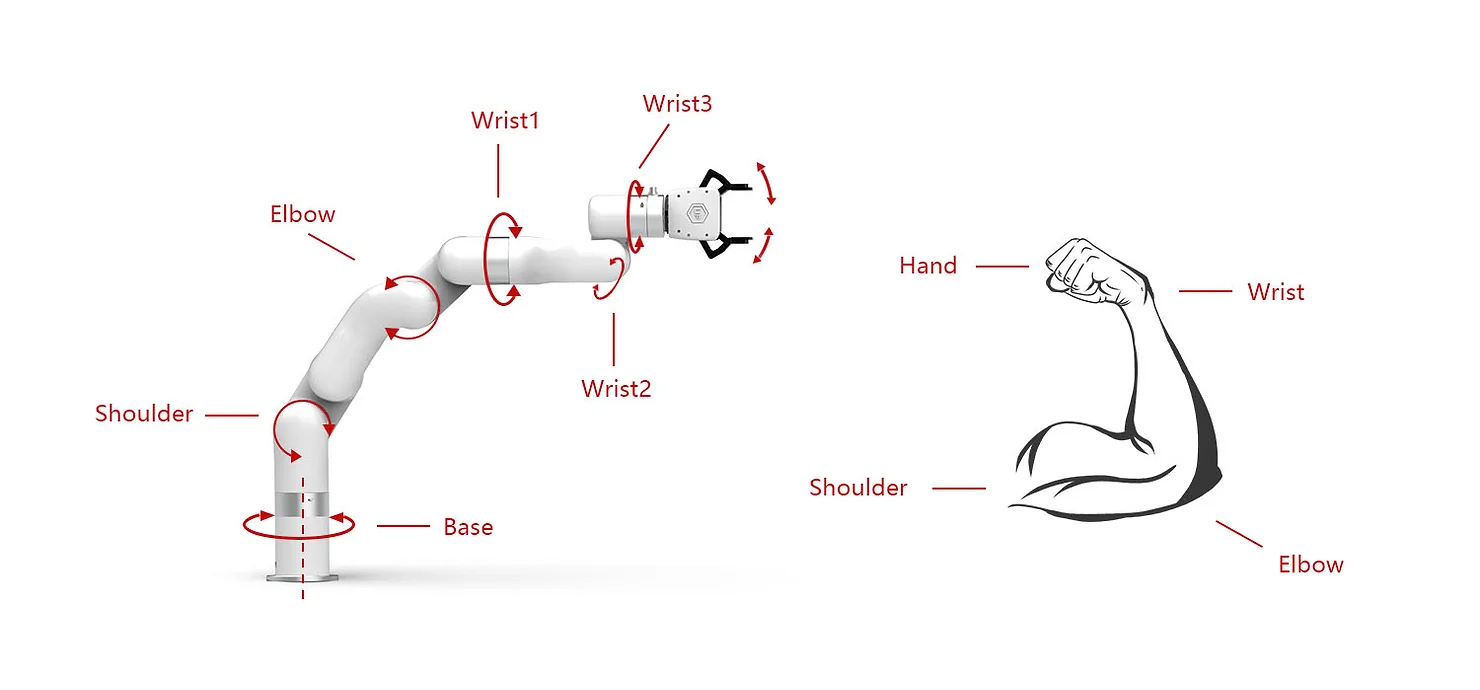
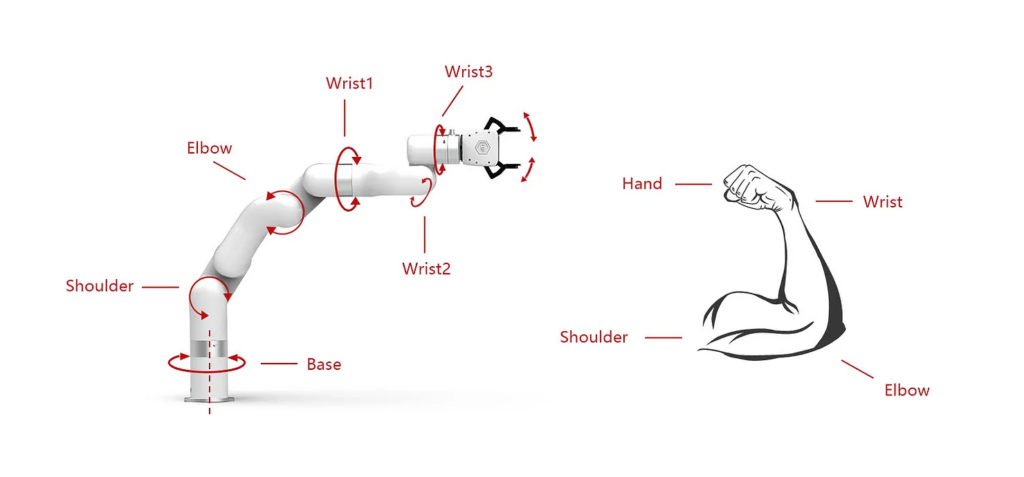
They are also called anthropomorphic arms. They are very identical to the human arm. Angular robotic arms are fitted with fingers and opposable thumbs. They are versatile and can be utilized for different functions.
Anthropomorphism refers to the ability of a device to mimic the structure of a human hand. Angular robotic arms are different in the sense that compared to other robotic arm types, they are well adapted to a human-oriented environment. The human hand possess features that enable it to handle different object shapes and conduct a large variety of movements. Therefore an anthropomorphic design enables the robot to interact with the environment correctly.
The end effectors in angular robot arms are designed to grasp and manipulate objects. The grasping process occurs in four phases;
•Pre-grasp phase
This is the first stage in the grasping process. In this phase, the arm aligns with the object to be grasped and manipulated.
•Grasp phase
At this stage, the end effector makes contact with the object. At this point, the object can be manipulated. If not properly done, the object could break. This occurs when the force and motion algorithms are not suitable. A grasp is stable if the object is well-constrained.
•Post-grasp transport
Once the object is stabilized, it can be transported. This entails moving the object from one position to another.
•Object placement at its destination
The grasping process is complete when the object arrives at its final destination. The success of this phase is dependent on a highly effective position strategy.
Anthropomorphism introduces dexterity to robot arms. Dexterity implies the ability of a robotic arm to execute highly precise tasks. These include tactile, visual and perception feedback. The term dexterity denotes complex autonomous tasks. Manipulations in a dexterous robotic arm are object centered. A dexterous robotic arm is designed to handle such manipulations, and the multi-finger design enables it to perform these manipulations with the required force for controlled and precise motion.
Furthermore, a dexterous robotic arm is fitted with internal and external sensors. Internal sensors function to assess internal parameters such as joint position and velocity. External sensors assess parameters such as humidity and temperature. The sensors work closely with the controller.
The actuators in angular robotic arms are situated far from the joints and not in individual finger joints. Hence, there’s a need to transduce the mechanical energy generated to individual finger joints. This is made possible by means of flexible shafts and drive belts.
Angular robots offer more degrees of movement. An example of angular robots is collaborative robots. They are six-axis robots. They offer six degrees of freedom, allowing movements in six directions. They are gradually becoming a common feature in factories.
Due to their anthropomorphic nature, they are adapted to function in a hybrid environment. Collaborative robots work closely with humans. They are ideal for processes that require more degrees of freedom—also heavy payload operations.
Collaborative robots
Collaborative robots are highly versatile. The dynamic nature of industrial workflow creates a necessity for robots to be adaptable to periodical changes. Collaborative robots respond to changes in assembly line operations swiftly. Hence if an assembly line stops production abruptly, they can be redeployed to continue working on another assembly line.
Increased degrees of freedom offered by collaborative robots affect their precision. More movements translate to more positional errors, and there will be irregularities in returning to the same spot. However, these inconsistencies become obvious when they are used in processes that require micron-level precision. An example is a board-level assembly.
Applications of collaborative robotic arms include:
•Material removal
•Part picking and handling
•Painting.
Advantages of collaborative robotic arms include:
•They are flexible and can be installed easily.
•Safe to work with.
•They are cost-effective.
Disadvantages of collaborative robotic arms
•They are not suited for operations requiring fast-paced motions. SCARA and Delta robots are better options.
•Precision is limited by a wide range of movements.
Delta Robotic arms
They are also called parallel robots due to their parallel link connections. Their axes are aligned parallel to one another. This type of configuration brings about increased speed. In addition, the motors of delta robots are placed in the main robot body as opposed to arms, usually about three or four large-sized motors. This arrangement makes the arms of delta robots much lighter.
Delta robotic arms are designed to handle low payloads. They utilize vacuum-type end effectors. These sets of robotic arms have high speed and high precision. They, however, require constant supervision being that they are complex to operate.
A delta robot R6Y3 model has a maximum payload of 3 kg. A repeatability value of approximately 0.2 mm along the X, Y, and Z axis. It has four degrees of freedom.
Application of Delta Robotic Arms
•Robotic assembly.
•Optical fiber alignment.
•Automated packaging.
•Flight simulators.
Advantages of Delta Robotic Arms
•High-speed operation; they are faster than SCARA robots by approximately 30%.
•Accurate and precise movements.
•Requires minimal workspace for installation; can be mounted overhead.
Disadvantages of Delta Robotic Arms
•Limited degrees of freedom; collaborative robots offer up to 6 degrees of freedom.
•They can’t handle heavy payloads.
How to choose A Right robot
The peculiarities of the intended application determine the type of robotic arm to be used. These peculiarities border on these five major aspects:
Reach of motion
This is defined as the maximum extent a robot arm can reach when fully outstretched. It is a measure of the robot’s workspace. A robot’s reach of motion is dependent on factors such as total size, link lengths and range of movements.
Repeatability requirements
The term repeatability refers to the correlation between the different positions reached by the robot’s end effector for the same position if the action is repeated several times. Processes that require great precision are best carried out using robots with high repeatability.
Payload
The payload of the robot arm is based on the weight of the object that you want to pick up with the robot. The payload of the robot is obtained by subtracting the weight of the end effector. This net weight obtained is the payload.
Price
The budget decides what robot you can use. As we know, a solid economic foundation is required to mechanize workflow with expensive industrial robots. However, for lightweight tasks you can replace industrial robots with affordable collaborative robots.
Speed requirements
A robot’s speed describes how quick it executes tasks. Some robots work at a low pace, while some work very fast. High-speed robots are suited for manufacturing industries.
Summary
Robotic arms are built to handle highly repetitive and complex processes with precision and great accuracy. They also help execute industrial tasks which are impossible to be undertaken by humans. The structural framework of a robotic arm determines its specific use, function and characteristics. Of the different types, collaborative robotic arms, which are a form of anthropomorphic robots, are the most versatile.
References
Ing. Desarro. vol.32 no.2 Barranquilla July/Dec. 2014
Haibin Yin, A unified design for lightweight robotic arms based on unified description of structure and drive trains, July 2017 International Journal of Advanced Robotic Systems 14(4):1
https://www.pwc.com/hu/hu/kiadvanyok/assets/pdf/impact_of_automation_on_jobs.pdf
https://lambdageeks.com/cylindrical-robots
https://www.omron-ap.com/products/family/3389/specification.html
https://www.shibaura-machine.co.jp/en/product/robot/lineup/axis/feature.html
https://www.google.com/url?q=https://mediaserver.goepson.com/ImConvServlet/imconv/4806b4e8e65cc29c4ab3ff07b06a2e8ecc07eb14/original%3FassetDescr%3DrSCARA_Robots_Brochure_CPD-54203.pdf&sa=U&ved=2ahUKEwjg-NzbosT6AhUSacAKHSITAe4QFnoECAAQAg&usg=AOvVaw1HtxOxkF4XlzukZYPd2mZH